




















Nachdem mein 1. Versuch eines Lokschuppens nicht ganz optimal war und ich ausserdem einen 2-ständigen Schuppen wollte kommt jetzt der nächste Versuch.
Das Grundgerüst besteht aus gefrästen 2mm Polystrolplatten, die Fenster sind aus Plakatkarton gelasert.






Aus einem nagelneuen Käfer vom „Deutschen Roten Kreuz“ entsteht ein ziemlich verwildert- und verwitterter Gendarmarie – Käfer.
Ich habe die Beschriftung entfernt und den Käfer in weiss lackiert. Die silber aufgemalten Scheinwerfer habe ich durch selbstgemachte Einsätze aus Aderendhülsen mit Gläsern aus UV Kleber ersetzt, ausserdem bekam das Fahrzeug passende Nummernschilder und Gendarmerie-Decals. Die abschliessende Verwitterung mit Washes und Rostflecken ist vielleicht etwas übertrieben obwohl es auf den Bildern noch schlimmer aussieht.

























Um mein imaginäres Dürnstein gedeihen zu lassen, habe ich mir überlegt, dass auch eine Ruine her muss,
Mit Trittschalldämmung, Farbe und etwas Geduld bin ich soweit gekommen:






Nachdem der Gleisbau etwas vorangegangen ist, kümmere ich mich zur Abwechslung um das drumherum. Nach langem hin und her überlegen, habe ich mich entschlossen die lange Kurve der oberen Strecke nicht auch in einem Tunnel zu verstecken, sonder sie durch einen Weinberg laufen zu lassen.
Hier sind die ersten Versuche einer Trassen-Anlage aus Styrodur mit Stützmauern aus Aquarien-Kies.




















Davor stehen die ersten selbstgebauten Reben, mehr dazu in Kürze…. (hoffentlich)
Jetzt fehlen nur noch die passenden Figuren:


Nachtrag: Nach genau 101 Weinstöcken ist der erste Bereich fertig geworden und auch meine kleine Kapelle hat ein Plätzchen gefunden.


































Servos sind aufgrund Ihres Preises und der relative einfachen Ansteuerung für vieles rund um die Modelleisenbahn zu gebrauchen.
Ich steuere Servos meistens über Arduinos oder andere ATMEL Mikroprozessoren die sich über die Arduino IDE programmieren lassen.
Um nicht immer den ganzen Sketch neu zu schreiben, oder ein Servo einfach direkt nach oder während des Einbaus zu Testen habe ich mir folgende Testschaltung aufgebaut:
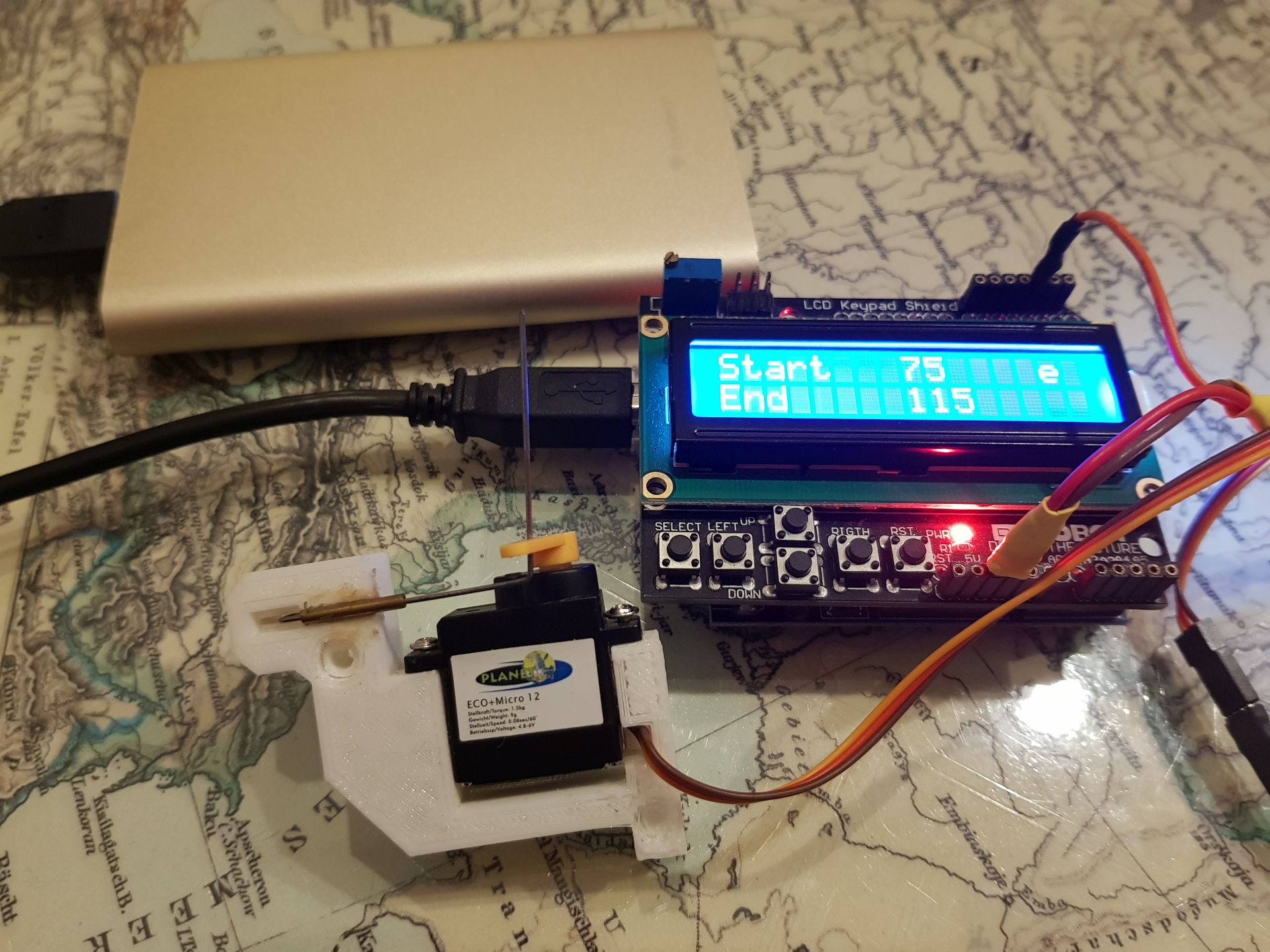
Das ganze ist einArduino Uno mit einem LCD Shield. Das Servo hängt mit der Steuerleitung an einem PWM Pin (in dem Fall Pin 2) und der Stromversorgung an den entsprechenden 5V und GND Pins am Arduino. Die Stromversorgung erfolgt über den USB Port mit einer Powerbank, damit das ganze mobil ist.
Mit LEFT – RIGHT wird der Startwinkel und mit UP – DOWN die Endposition des Sevos justiert. SELECT löst die Bewegung aus.
Somit kann man die benötigten Winkel zB für Weichen einfach austesten um sie später in einen Decoder Sketch übernehmen.
Viel Spass beim Nachbau!
#include <LiquidCrystal.h> #include <Servo.h> LiquidCrystal lcd(8, 9, 4, 5, 6, 7); Servo s_servo; int readkey; char keypressed ='x'; int start_angle = 75; int end_angle = 115; int s_data = 2; char last_pos = 'e'; int s_pos; int s_speed = 20; void setup() { lcd.begin(16, 2); lcd.print("Servotest 2018"); lcd.setCursor(0, 1); lcd.print("by XFLOW"); delay(3000); lcd.clear(); s_servo.attach(s_data); } void display_write(){ lcd.setCursor(0, 0); lcd.print("Start"); lcd.setCursor (8,0); lcd.print(start_angle); lcd.setCursor(0, 1); lcd.print("End"); lcd.setCursor (8,1); lcd.print(end_angle); lcd.setCursor (14,0); lcd.print(last_pos); } void read_key(){ readkey=analogRead(0); if (readkey<50) { lcd.setCursor (14,1); lcd.print("R"); keypressed = 'r'; } else if(readkey<195) { lcd.setCursor (14,1); lcd.print("U"); keypressed = 'u'; } else if(readkey<380) { lcd.setCursor (14,1); lcd.print("D"); keypressed = 'd'; } else if(readkey<600) { lcd.setCursor (14,1); lcd.print("L"); keypressed = 'l'; } else if(readkey<900) { lcd.setCursor (14,1); lcd.print("S"); keypressed = 's'; } delay (200); } void keyprocess(){ if (keypressed == 'r'){ start_angle++; } else if (keypressed =='l'){ start_angle--; } else if (keypressed =='u'){ end_angle++; } else if (keypressed =='d'){ end_angle--; } else if (keypressed =='s'){ servo_action(); } keypressed = 'x'; } void servo_action(){ if (last_pos=='e') { s_servo.write(start_angle); last_pos = 's'; } else if (last_pos=='s') { s_servo.write(end_angle); last_pos = 'e'; } delay (200); } void loop() { display_write(); read_key(); keyprocess(); lcd.clear(); } |














